


Энкодер (заимствованное зарубежное слово encoder), означает преобразователь. Сегодня это название объединяет целый класс изделий, получивших широкое распространение в автоматизации промышленных процессов. В качестве устройства контроля положения выделяют две основные группы по назначению: угловые (rotary, angular) и линейные (linear encoder). В отечественной технической и конструкторской литературе чаще встречаются следующие названия: датчик обратной связи (ДОС), преобразователь угловых / линейных перемещений, датчик угла поворота (ДУП), датчик положения, шифратор, кодировщик. Также популярны названия на английском: transducer, sensor. В немецкой документации: drehgeber (если угловой), line geber (если линейный).
Объединив все эти понятия, можно сказать, что энкодером называют устройство, которое преобразовывает механическое перемещение (линейное движение или вращение) посредством изменения физических величин (проходящий свет, магнитное или индуктивное поле) в последовательность сигналов. Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Принцип работы энкодера
Как обеспечивается работа устройства лучше всего видно, если заглянуть «внутрь». Рассмотрим типовую и самую распространенную схему построения преобразователя – оптоэлектронную с подшипниковым узлом. На рисунке ниже представлен оптический многооборотный абсолютный датчик с цельным валом.
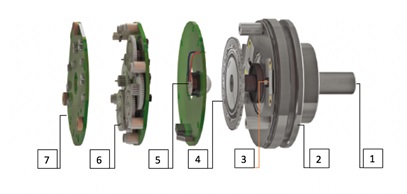
Здесь видны практически все основные узлы современного изделия:
- – вал энкодера
- – фланец (на данном рисунке представлен зажимной тип)
- – фотоприемник инфракрасного (ИК) света
- – оптический диск с растрами (метками, если инкрементный) или кодовыми дорожками (если абсолютный)
- – ИК осветитель (LED) с линзой на плате
- – механический редуктор с зубчатыми колесами (многооборотный модуль)
- – плата обработки сигнала с выходными формирователями и конверторами интерфейса.
Элементы 1, 2, 4 формируют оптико-механический подшипниковый узел. Оптический диск (лимб) 4 может быть стеклянным, металлическим, пластиковым. В зависимости от производителя бывают конструкции, где элементы 3 и 5 поменяны местами. Механический редуктор 6 встречается только у многооборотных абсолютных преобразователей.
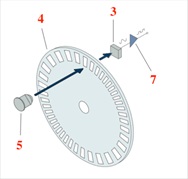
На рисунке выше показана работа энкодера:
- ИК свет от источника 5 проходит через кодовый диск 4, и попадает на приемник (фото матрицу) 3
- Фотоприёмник имеет нанесенную на чувствительном элементе или расположенную над ним маску (индикаторную пластину), которая также имеет «окошки», как на вращающемся диске
- Из-за поочередного перекрытия и открытия окошек маски в процессе вращения вала датчика, проходящий свет имеет аналоговую структуру. Нет света -> нарастает -> максимум света -> убывает -> нет света
- Это регистрирует фото сенсор
- Далее аналоговый сигнал с приемника преобразуется платой обработки 7 в необходимые для дальнейшей передачи информации импульсы.
Виды энкодера
Основные типы, которые на слуху у всех специалистов, занимающихся автоматизацией:
- абсолютные (absolute) – всегда знают свое положение
- инкрементные (incremental) – относительные, считают только при включенном питании и вращении.
С развитием технологии, абсолютные энкодеры занимают все более прочные позиции на рынке. Если раньше соотношение было 70 на 30 и даже 80 на 20 % в пользу икнрементальных, то теперь их позиции равны. А в некоторых отраслях абсолютные преобладают.
Отдельно здесь можно выделить многооборотные энкодеры. Которые не только «запоминают» позицию внутри оборота, но и знают на каком обороте находятся. Количество оборотов зависит от используемого многооборотного модуля. У редукторного механического модуля количество регистрируемых оборотов как правило ограничено 12 (4096) или 14 битами (16384). У модуля со встроенной в энкодер батарейкой – до 18 (262144) и более бит. Многооборотный модуль, построенный на сенсорах Виганда, считает до 31 (2147483648) бит оборотов.

По конструкции выделяют угловые преобразователи следующих типов:
- С полым валом (hollow shaft):
- Сквозным (thru hollow)
- Глухим (тупиковым)(blind hollow).
- С цельным валом (solid shaft) с:
- Cинхро фланцем (synchro flange)
- Зажимным (clamping)
- Квадратным (square)
- Пилотным (pilot).
Самое полное портфолио энкодеров на рынке вы найдете на сайте f-enco.ru
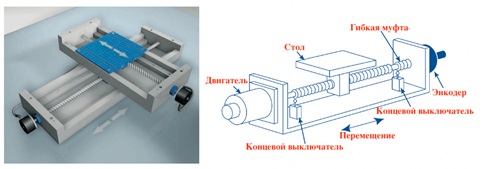
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы

- Медицинская техника
- Томографы
- Роботы-хирурги
- Строительная и карьерная техника
- Передвижные буровые станции
- Карьерные самосвалы
- Передвижные краны
- Промышленные задвижки и регулирование уровня воды
- Радиальные и барабанные ворота
- Вертикальные шлюзы
- Автоматические трубопроводные задвижки
- Лифты
- Пассажирские
- Грузовые
- Специализированные подъемники
- Хранение и перемещение грузов
- Автоматизированные склады
- Автопогрузчики
- Портовые краны
- Багажные ленты
- Ножничные подъемники
- Альтернативная энергетика
- Ветряные генераторы
- Солнечные батареи
- Станкостроение и модернизация станков
- Универсальные станки
- Станки с ЧПУ
- Сервомоторы
Популярные категории:



















